Un robot aprendió a realizar tareas quirúrgicas de manera experta con solo ver videos
Al observar imágenes de cirugías previas, el dispositivo desarrolló habilidades críticas para operar con precisión comparable a humanos. Investigaciones en universidades prestigiosas avanzan hacia su autonomía completa
La Investigadores de las universidades de Johns Hopkins y Stanford lograron entrenar un sistema robótico quirúrgico para realizar tareas clave solo mediante el análisis de videos de cirugías previas, marcando un hito en el campo de la cirugía automatizada.
El equipo de investigadores se enfocó en entrenar un sistema robótico quirúrgico utilizando videos de cirugías anteriores, una técnica de aprendizaje conocida como aprendizaje por imitación. A diferencia de los métodos convencionales, que implican una codificación detallada de cada paso quirúrgico, el aprendizaje por imitación permite que los robots observen y emulen las tareas realizadas por cirujanos expertos.
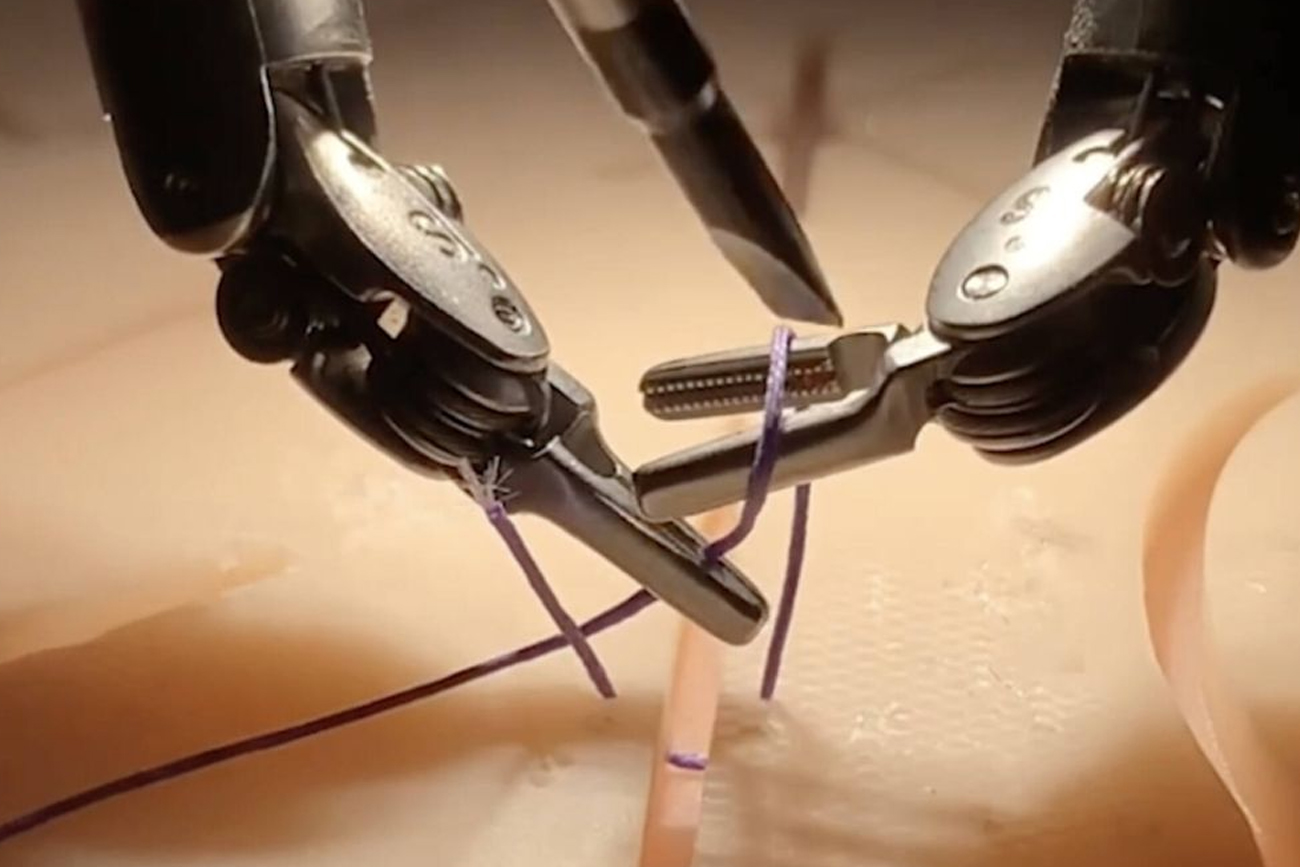
Para estos estudios, los investigadores utilizaron el sistema Da Vinci, una de las plataformas robóticas quirúrgicas más avanzadas y reconocidas en el ámbito médico. Este sistema, normalmente operado por un cirujano humano, cuenta con varios brazos robóticos que imitan los movimientos del cirujano, lo que permite realizar maniobras complejas con una precisión sin igual.
El método de aprendizaje por imitación empleado en este estudio es una innovación importante, ya que permite a los robots aprender sin necesidad de que cada paso sea codificado manualmente. En lugar de instrucciones específicas, el robot procesa cientos de videos de procedimientos quirúrgicos, grabados desde cámaras de muñeca en los brazos del sistema Da Vinci, y extrae la cinemática necesaria para realizar tareas precisas.
A diferencia de los modelos de IA que generan texto, como los chatbots, este modelo genera movimientos y direcciones precisas que luego el sistema Da Vinci traduce en acciones mecánicas. Este método ofrece la posibilidad de replicar movimientos quirúrgicos con gran precisión y adaptarse a la variabilidad de cada caso.
Uno de los aspectos más sorprendentes de este avance es la capacidad del robot para autocorregir sus errores. Durante el entrenamiento, el robot demostró ser capaz de identificar fallos, como una aguja que se le cae de los brazos, y rectificar su operación sin intervención externa. Esta habilidad de reconocer y enmendar errores de manera autónoma es un paso crucial hacia la cirugía robótica independiente.
El avance en el uso de robots quirúrgicos plantea la posibilidad de una cirugía totalmente autónoma, que podría realizar procedimientos complejos sin necesidad de intervención humana en cada paso. El equipo de investigadores de Johns Hopkins cree que, con el método de aprendizaje por imitación, los robots quirúrgicos podrían aprender procedimientos completos en días en lugar de años, reduciendo los errores médicos y ofreciendo cirugías de mayor precisión. Este desarrollo podría hacer que las cirugías avanzadas sean más accesibles, especialmente en áreas remotas o en sistemas de salud con pocos especialistas.
Aunque ya existen dispositivos automatizados para cirugías específicas, como el sistema CorPath de Corindus, utilizado en procedimientos cardiovasculares, estos suelen estar limitados a pasos concretos y requieren supervisión constante de un médico. Otros sistemas, como el STAR (Smart Tissue Autonomous Robot), desarrollado también en Johns Hopkins en 2022, lograron un alto grado de autonomía al suturar tejidos en un experimento con animales.





